Duc-Tri VO
Home
Résumé
Tutorials
Robotics
Categories
SCADA
Programming
Control System
Contact
All Posts
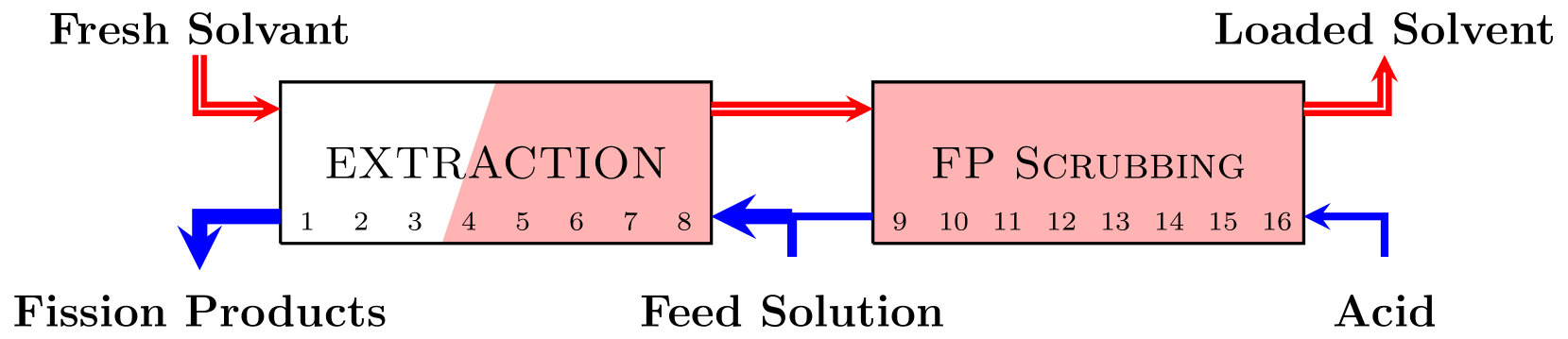
Nonlinear Model Predictive Control for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process
In
Control System
,
Dec 29, 2024
« Prev
1
2
»
Featured
Dynamic Model of Planar Robots with Two Revolut Joints
In
Robotics
,
Kinematics of Planar Robots with Revolut Joints
In
Robotics
,
Hierarchical Control using Approximate Simulation Relations
In
Control System
,
Inverted Pendulumn Modelling and Control
In
Control System
,
Install Qt on Linux
In
Programming
,
Python Clean Code, Style Guides, Formatters, and Linters
In
Programming
,
Code Versioning
In
Programming
,
ANN-Based Adaptive NMPC for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process
In
Control System
,
PSO-Based Adaptive NMPC for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process
In
Control System
,
Nonlinear Model Predictive Control for Uranium Extraction-Scrubbing Operation in Spent Nuclear Fuel Treatment Process
In
Control System
,